

DisPad: Flexible On-Body Displacement of Fabric Sensors for Robust Joint-Motion Tracking
Xiaowei Chen, Xiao Jiang, Jiawei Fang, Shihui Guo*, Juncong Lin, Minghong Liao, Guoliang Luo, Hongbo Fu
Abstract
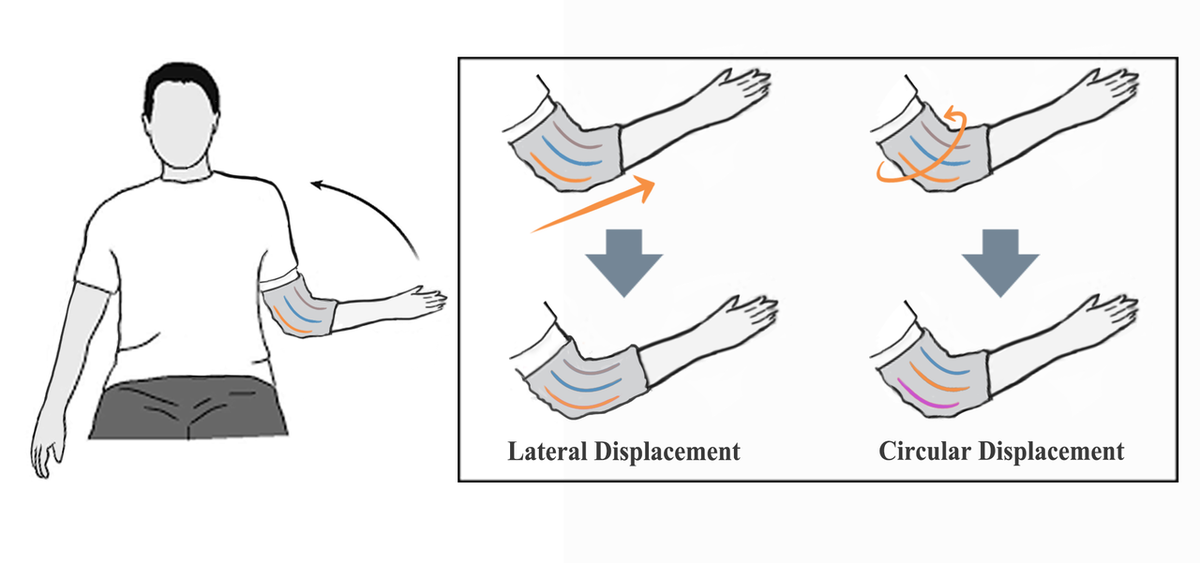
The last few decades have witnessed an emerging trend of wearable soft sensors; however, there are important signal-processing challenges for soft sensors that still limit their practical deployment. They are error-prone when displaced, resulting in significant deviations from their ideal sensor output. In this work, we propose a novel prototype that integrates an elbow pad with a sparse network of soft sensors. Our prototype is fully bio-compatible, stretchable, and wearable. We develop a learning-based method to predict the elbow orientation angle and achieve an average tracking error of 9.82 degrees for single-user multi-motion experiments. With transfer learning, our method achieves the average tracking errors of 10.98 degrees and 11.81 degrees across different motion types and users, respectively. Our core contributions lie in a solution that realizes robust and stable human joint motion tracking across different device displacements.
BibTex

 闽公网安备 35020302034954号
闽公网安备 35020302034954号